1. Tujuan dan Perancangan [Kembali]









A. PWM (Pulse Width Modulation)
PWM adalah sebuah cara atau metode yang digunakan dengan tujuan untuk memanipulasi tebal sinyal dengan nilai amplitudo dan frekuensi yang tetap. PWM memiliki cara kerja yang berbanding terbalik dengan ADC (Analog Digital Converter). Jika ADC berfungsi untuk mengkonversikan sinyal analog ke digital, PWM ini melakukan fungsi sebaliknya. Yaitu untuk menghasilkan sinyal analog dari perangkat digital.
Contoh pengaplikasian PWM diterapkan pada beberapa situasi. Seperti digunakan untuk memodulasi data telekomunikasi, digunakan untuk kontrol daya, audio effect dan lain sebagainya. Fungsi PWM adalah sebagai metode yang sering digunakan untuk mengontrol daya. Selain sebagai pengatur daya, PWM juga berfungsi sebagai pengatur gerak dalam sebuah perangkat elektronika.
Sesuai namanya, yakni Pulse Width Modulation maka dalam sistemnya PWM digunakan untuk mengubah lebar pulsa. Hal ini karena pada umumnya, sinyal PWM memiliki frekuensi dasar dan juga amplitudo yang terbilang tetap. Dalam perhitungannya, lebar pulsa dalam PWM dibuat berbanding lurus dengan amplitudo. Artinya disini, sinyal PWM memiliki frekuensi gelombang yang tetap. Namun tetap saja memiliki nilai dutycycle yang berbeda, yaitu dengan digit nilai antara 0 sampai dengan 100%.

Metode PWM memang dibuat dengan tujuan untuk mendapatkan sinyal analog dari piranti digital. Untuk membangkitkan sinyal analog pada PWM, Anda dapat melakukan berbagai cara. Salah satunya dengan memanfaatkan metode analog dan digital
Ketika menggunakan metode analog, perubahan PWM terjadi dengan sangat halus. Namun ketika Anda menggunakan metode digital, maka perubahan pada PWM akan di pengaruhi oleh resolusi dari alat itu sendiri. Untuk menghitung resolusinya dari PWM, Anda dapat menggunakan rumus sederhana. Misalnya sebuah PWM yang memiliki resolusi 8 bit, maka nilai PWM tersebut memiliki perubahan variasi sebanyak 0 sampai dengan 225. Nilai ini mewakili dutycycle yang dikeluarkan oleh PWM tersebut. Yang mana PWM memiliki nilai antara 0 sampai dengan 100 %.
B. ADC (Analog to Digital Converter)
ADC atau Analog to Digital Converter merupakan salah satu perangkat elektronika yang digunakan sebagai penghubung dalam pemrosesan sinyal analog oleh sistem digital. Fungsi utama dari fitur ini adalah mengubah sinyal masukan yang masih dalam bentuk sinyal analog menjadi sinyal digital dengan bentuk kode-kode digital. Ada 2 faktor yang perlu diperhatikan pada proses kerja ADC yaitu kecepatan sampling dan resolusi. Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi menyatakan tingkat ketelitian yang dimilliki. Pada Arduino, resolusi yang dimiliki adalah 10 bit atau rentang nilai digital antara 0 - 1023. Dan pada Arduino tegangan referensi yang digunakan adalah 5 volt, hal ini berarti ADC pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt. Pada Arduino, menggunakan pin analog input yang diawali dengan kode A( A0- A5 padaArduino Uno). Fungsi untuk mengambil data sinyal input analog menggunakan analogRead(pin);

C. Mikrokontroler
Mikrokontroler adalah suatu chip berupa IC (Integrated Circuit) yang dapat menerima sinyal input, mengolahnya dan memberikan sinyal output sesuai dengan program yang diisikan ke dalamnya. Sinyal input mikrokontroler berasal dari sensor yang merupakan informasi dari lingkungan sedangkan sinyal output ditujukan kepada aktuator yang dapat memberikan efek ke lingkungan. Jadi secara sederhana mikrokontroler dapat diibaratkan sebagai otak dari suatu perangkat/produk yang mempu berinteraksi dengan lingkungan sekitarnya. Mikrokontroler pada dasarnya adalah komputer dalam satu chip, yang di dalamnya terdapat mikroprosesor, memori, jalur Input/Output (I/O) dan perangkat pelengkap lainnya. Kecepatan pengolahan data pada mikrokontroler lebih rendah jika dibandingkan dengan PC. Pada PC kecepatan mikroprosesor yang digunakan saat ini telah mencapai orde GHz, sedangkan kecepatan operasi mikrokontroler pada umumnya berkisar antara 1 – 16 MHz. Begitu juga kapasitas RAM dan ROM pada PC yang bisa mencapai orde Gbyte, dibandingkan dengan mikrokontroler yang hanya berkisar pada orde byte/Kbyte.
Meskipun kecepatan pengolahan data dan kapasitas memori pada mikrokontroler jauh lebih kecil jika dibandingkan dengan komputer personal, namun kemampuan mikrokontroler sudah cukup untuk dapat digunakan pada banyak aplikasi terutama karena ukurannya yang kompak. Mikrokontroler sering digunakan pada sistem yang tidak terlalu kompleks dan tidak memerlukan kemampuan komputasi yang tinggi.

D. Komunikasi
Kegunaan dasar dari sistem komunikasi adalah menjalankan pertukaran data antara dua pihak. Pada gambar dibawah ini merupakan suatu model komunikasi yang sederhana yaitu komunikasi dua arah. Pada mikrokontroler ada beberapa komunikasi yaitu:
- UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat peripheral.
Cara kerja komunikasi UART:

Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di transfer secara parallel ke data bus penerima
- Serial Peripheral Interface ( SPI ) merupakan salah satu mode komunikasi serial synchrounous kecepatan tinggi yang dimiliki oleh ATmega 328. Komunikasi SPI membutuhkan 3 jalur yaituMOSI, MISO, dan SCK. Melalui komunikasi ini data dapat saling dikirimkan baik antara mikrokontroller maupun antara mikrokontroller dengan peripheral lain di luar mikrokontroler.
MOSI : Master Output Slave Input Artinya jika dikonfigurasi sebagai master maka pin MOSI sebagai output tetapi jika dikonfigurasi sebagai slave maka pin MOSI sebagai input.
MISO : Master Input Slave Output Artinya jika dikonfigurasi sebagai master maka pin MISO sebagai input tetapi jika dikonfigurasi sebagai slave maka pin MISO sebagai output. cdaf
SCLK : Clock Jika dikonfigurasi sebagai master maka pin CLK berlaku sebagai output tetapi jika dikonfigurasi sebagai slave maka pin CLK berlaku sebagai input. SS/CS : Slave Select/ Chip Select adalah jalur master memilih slave mana yang akan dikirimkan data.

Sinyal clock dialirkan dari master ke slave yang berfungsi untuk sinkronisasi. Master dapat memilih slave mana yang akan dikirimkan data melalui slave select, kemudian data dikirimkan dari master ke slave melalui MOSI. Jika master butuh respon data maka slave akan mentransfer data ke master melalui MISO.
- Inter Integrated Circuit atau sering disebut I2C adalah standar komunikasi serial dua arahmenggunakan dua saluran yang didisain khusus untuk mengirim maupun menerima data. Sistem I2C terdiri dari saluran SCL (Serial Clock) dan SDA (Serial Data) yang membawa informasi data antara I2C dengan pengontrolnya.

Pada I2C, data ditransfer dalam bentuk message yang terdiri dari kondisi start, Address Frame, R/W bit, ACK/NACK bit, Data Frame 1, Data Frame 2, dan kondisi Stop. Kondisi start dimana saat pada SDA beralih dari logika high ke low sebelum SCL.Kondisi stop dimana saat pada SDA beralih dari logika low ke high sebelum SCL. R/W bit berfungsi untuk menentukan apakah master mengirim data ke slave atau meminta data dari slave. (logika 0 = mengirim data ke slave, logika 1 = meminta data dari slave) ACK/NACK bit berfungsi sebagai pemberi kabar jika data frame ataupun address frame telah diterima receiver.
E. Sensor-Sensor
1) Sensor Ultrasonik

Fungsi dasar dari ultrasonik adalah mengubah listrik menjadi mekanik yang mampu memproduksi bunyi dengan frekuensi gelombang yang sudah ditentukan.
Dalam bidang kesehatan, gelombang ultrasonik bisa digunakan untuk melihat organ-organ dalam tubuh manusia seperti untuk mendeteksi tumor, liver, otak dan menghancurkan batu ginjal. Gelombang ultrasonik juga dimanfaatkan pada alat USG (ultrasonografi) yang biasa digunakan oleh dokter kandungan.
Dalam bidang industri, gelombang ultrasonik digunakan untuk mendeteksi keretakan pada logam, meratakan campuran besi dan timah, meratakan campuran susu agar homogen, mensterilkan makanan yang diawetkan dalam kaleng, dan membersihkan benda benda yang sangat halus. Gelombang ultrasonik juga bisa digunakan untuk mendeteksi keberadaan mineral maupun minyak bumi yang tersimpan di dalam perut bumi.
Dalam bidang pertahanan, gelombang ultrasonik digunakan sebagai radar atau navigasi, di darat maupun di dalam air. Gelombang ultrasonik digunakan oleh kapal pemburu untuk mengetahui keberadaan kapal selam, dipasang pada kapal selam untuk mengetahui keberadaan kapal yang berada di atas permukaan air, mengukur kedalaman palung laut, mendeteksi ranjau, dan menentukan puosisi sekelompok ikan.
- Spesifikasi
Berikut ini adalah spesifikasi dari sensor ultrasonik :
> Tegangan : 5 VDC
> Arus : 15 mA
> Frekuensi Kerja : 40 KHz
> Jarak Minimum : 2 cm
> Jarak Maksimum : 400 cm (4 meter)
> Sudut Pengukuran : 15 Derajat
> Input Sinyal Trigger : 10uS pulsa TTL
> Output Sinyal Echo : Sinyal level TTL
> Dimensi : 45mm x 20 mm x 15 mm
- Cara kerja
Cara kerja sensor ultrasonik adalah sebagai berikut :
· Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
· Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
· Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus :
S = 340.t/3
dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
2) Sensor Touch

Aplikasi Sensor Sentuh dapat dengan mudah diproduksi dengan desain yang menarik dan dalam investasi yang lebih sedikit.
Oleh karena itu ini banyak disukai di ponsel, iPod, berbagai aplikasi industri dan otomotif. Dalam pengukuran jarak, tekanan, dll. sensor ini digunakan. Dibutuhkan sejumlah kekuatan untuk mulai beroperasi. Jadi, sensor jenis ini digunakan di keypad alat musik, touchpad yang resistif, dll.
Aplikasi sensor sentuh yang paling umum dapat dilihat di keran air sehingga dengan satu sentuhan, aliran air yang mengalir dapat dikontrol. Sensor ini juga digunakan dalam otomatisasi rumah menggunakan proyek Arduino atau Raspberry pi.
- Spesifikasi
> Konsumsi daya sangat sedikit
> Tegangan: 2-5.5V DC (optimal 3v)
> Dapat menggantikan fungsi tombol saklar
> Dilengkapi 4 buah lubang baut M2
> Ukuran: 24x24x7.2mm
> Output high VOH: 0.8VCC (typical)
> Output low VOL: 0.3VCC (max)
> Arus Output Pin Sink (@ VCC 3V, VOL 0.6V): 8mA
> Arus Output pin pull-up (@ VCC=3V, VOH=2.4V): 4mA
> Waktu respon (low power mode): max 220ms
> Waktu respon (touch mode): max 60ms
- Cara Kerja
• Ketika ada sentuhan tangan manusia yang mengenai sensor dari dalam gudang, maka secara otomatis sensor akan bekerja dan mengalirkan ke arduino lalu membuka pintu.
• Sistem akan bekerja pada saat posisi standby (siap).
3) RFID

Sistem wiring pada RFID dengan cara menyambungkan pin SDA pada pin ss arduino(10), SCK pada pin SCK(13), pin MOSI pada MOSI(11), pin MISO pada pin MISO(12), untuk RST disambungkan ke pin digital, pada rangkaian dipasang pada pin 9. VCC dihubungkan ke 3,3V karena RFID hanya membutuhkan tegangan 3,3V.
- Spesifikasi
- Tegangan Operasional: 2.5V~3.3V.
- Operasi/Siaga saat ini: 13~26mA/10~13mA.
- Frekuensi Operasi: 13,56MHz.
- Mendukung komunikasi kecepatan transfer ISO/IEC 14443A yang lebih tinggi hingga 848 KBd.
- Kecepatan bus SPI hingga 10Mbit/dtk.
- Antarmuka I2C-bus hingga 400 kBd dalam mode Cepat, hingga 3400 kBd dalam mode Kecepatan Tinggi.
- RS232 Serial UART hingga 1228,8 kBd, dengan level voltase bergantung pada voltase pin Pasokan.
- Kompatibel dengan kartu MIFARE dan ISO 14443A.
9. Jarak pengoperasian tipikal dalam mode Baca/Tulis hingga 50 mm tergantung pada antena ukuran dan penyetelan.
- Cara Kerja
RFID tag ditempelkan/didekatkan ke RFID reader yang mana RFID tag akan dibaca oleh RFID reader.
F. Arduino

Arduino adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang. Hardwarenya memiliki prosesor Atmel AVR dan softwarenya memiliki bahasa pemrograman sendiri.
Seperti yang sudah diketahui bahwa Mikrokontroler itu sendiri adalah IC (integrated circuit) yang dapat diprogram menggunakan komputer. Fungsi dari menanamkan program pada mikrokontroler antara lain agar rangkaian elektronik dapat membaca input, memprosesnya dan kemudian menghasilkan output sesuai yang diinginkan dari inputan tersebut. Dengan kata lain mikrokontroler bertugas sebagai ‘otak’ yang mengendalikan input, proses dan output dari rangkaian elektronik.
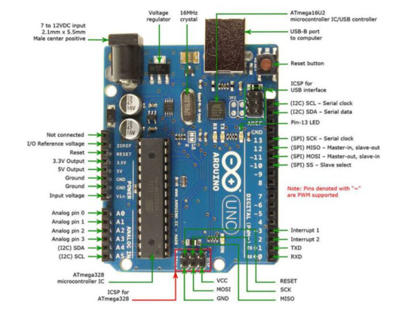
Bagian- bagian arduino :

- Power (USB / Barrel Jack)
Setiap papan Arduino membutuhkan cara untuk terhubung ke sumber daya. Arduino UNO dapat diaktifkan dari kabel USB yang berasal dari komputer Anda atau catu daya dinding (seperti ini) yang diakhiri dengan jack barel. Pada gambar di atas koneksi USB berlabel (1) dan jack laras diberi label (2).
- Pin (5V, 3.3V, GND, Analog, Digital, PWM, AREF)
Pin pada Arduino Anda adalah tempat di mana Anda menghubungkan kabel untuk membangun sirkuit (mungkin bersamaan dengan papan tempat memotong roti dan beberapa kawat. Mereka biasanya memiliki ‘header’ plastik hitam yang memungkinkan Anda untuk hanya memasukkan kabel tepat ke papan. Arduino memiliki beberapa jenis pin, yang masing-masing dilabeli di papan dan digunakan untuk fungsi yang berbeda.
GND (3): Singkatan dari ‘Ground’. Ada beberapa pin GND di Arduino, yang salah satunya dapat digunakan untuk menghubungkan ke sirkuit Anda.
5V (4) & 3.3V (5): Seperti yang Anda duga, pin 5V memasok daya 5 volt, dan pin 3,3V memasok daya 3,3 volt. Sebagian besar komponen sederhana yang digunakan dengan Arduino berjalan dengan gembira dari 5 atau 3,3 volt.
Digital (7): Di seberang pin analog adalah pin digital (0 hingga 13 pada UNO). Pin ini dapat digunakan untuk input digital (seperti memberi tahu jika tombol ditekan) dan output digital (seperti menyalakan daya LED).
PWM (8): Anda mungkin telah memperhatikan tilde (~) di sebelah beberapa pin digital (3, 5, 6, 9, 10, dan 11 pada UNO). Pin ini bertindak sebagai pin digital normal, tetapi juga dapat digunakan untuk sesuatu yang disebut Pulse-Width Modulation (PWM). Kami memiliki tutorial tentang PWM, tetapi untuk saat ini, anggap pin ini mampu mensimulasikan output analog (seperti memudarkan LED masuk dan keluar).
AREF (9): Singkatan dari Referensi Analog. Sebagian besar waktu Anda dapat meninggalkan pin ini sendirian. Kadang-kadang digunakan untuk mengatur tegangan referensi eksternal (antara 0 dan 5 Volts) sebagai batas atas untuk pin input analog.
- Tombol Atur ulang (Reset)
Sama seperti Nintendo asli, Arduino memiliki tombol reset (10). Menekannya untuk sementara akan menghubungkan pin reset ke ground dan me-restart kode yang dimuat pada Arduino. Ini bisa sangat berguna jika kode Anda tidak berulang, tetapi Anda ingin mengujinya berulang kali. Berbeda dengan Nintendo yang asli, meniup Arduino biasanya tidak memperbaiki masalah.
- Indikator Daya LED
Tepat di bawah dan di sebelah kanan kata “UNO” di papan sirkuit Anda, ada LED kecil di sebelah kata ‘ON’ (11). LED ini akan menyala setiap kali Anda mencolokkan Arduino ke sumber listrik. Jika lampu ini tidak menyala, ada kemungkinan besar ada sesuatu yang salah.
- LED TX RX
TX adalah kependekan dari pengiriman, RX adalah kependekan dari penerimaan. Tanda-tanda ini muncul sedikit di elektronik untuk menunjukkan pin yang bertanggung jawab untuk komunikasi serial. Dalam kasus kami, ada dua tempat di Arduino UNO di mana TX dan RX muncul – sekali dengan pin digital 0 dan 1, dan kedua kalinya di sebelah TX dan LED indikator RX (12).
- IC utama
Benda hitam dengan semua kaki logam adalah IC, atau Integrated Circuit (13).
- Regulator tegangan
Regulator tegangan (14) sebenarnya bukan sesuatu yang Anda dapat (atau harus) berinteraksi dengan Arduino. Tetapi berpotensi bermanfaat untuk mengetahui bahwa itu ada dan untuk apa itu. Regulator tegangan melakukan apa yang dikatakannya – ia mengontrol jumlah tegangan yang dibiarkan masuk ke papan Arduino. Anggap saja sebagai semacam penjaga gerbang; itu akan mengubah tegangan ekstra yang dapat membahayakan sirkuit. Tentu saja, ia memiliki batasnya, jadi jangan menghubungkan Arduino Anda dengan apa pun yang lebih besar dari 20 volt.
Bagian - bagian pendukung:
- RAM
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory).
- ROM
ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dari Mask ROM, PROM, EPROM, EEPROM.
G. LCD (Liquid Crystal Display)

Fungsi dari LCD yaitu sebagai suatu tampilan data, huruf, karakter ataupun grafik. Bentuk dari LCD ini tipis, sedikit panas serta mempunyai resolusi yang tinggi. LCD sudah digunakan diberbagai bidang khususnya alat-alat elektronik seperti layar TV, handphone, laptop, komputer dan notebook. LCD kini digunakan di hampir setiap teknologi yang membutuhkan layar.
Pembuatan LCD (Liquid Crystal Display) adalah dengan menggunakan teknologi CMOS logic yang bekerja tidak menghasilkan cahaya. Namun LCD dapat memantulkan cahaya yang ada disekitar LCD tersebut. Material yang dibutuhkan untuk membuat LCD terdiri dari beberapa lapisan campuran organik antara elektroda transparan indium oksida dengan lapisan kaca bening. LCD 16 x 2 berbentuk lapisan elektroda pada bagian kaca belakang dan berbentuk tampilan seven-segment. Ketika elektroda tersebut mendapatkan medan listrik atau tegangan, ia akan aktif dan molekul organik yang silinder dan panjang akan menyesuaikan diri dengan elektroda yang berasal dari segmen tersebut.
- Spesifikasi
Spesifikasi LCD 16X2 dibahas di bawah ini.
· Tegangan operasi displat ini berkisar dari 4.7V hingga 5.3V.
· Bezel display adalah 72 x 25mm.
· Arus operasi adalah 1mA tanpa lampu latar.
· Ukuran PCB modul adalah 80L x 36W x 10H mm.
· Pengontrol HD47780.
· Warna LED untuk lampu latar adalah hijau atau biru.
· Jumlah kolom 16.
· Jumlah baris 2.
· Jumlah pin LCD 16.
· Jumlah Karakter 32.
· Ia bekerja dalam mode 4-bit dan 8-bit.
· Kotak piksel setiap karakter adalah 5 × 8 piksel.
· Ukuran font karakter adalah lebar 0,125 x tinggi 0,200.
- Cara Kerja
> Suatu layar LCD dapat menampilkan gambar yang dimana kualitasnya ditentukan oleh jumlah piksel.
> Semakin banyak jumlah piksel, maka akan semakin tinggi pula resolusi gambar yang dapat ditampilkan pada layar.
> Piksel ini dapat dibedakan menjadi 3 subpiksel yang dimana masing-masing mempunyai warna biru, merah dan hijau.
> Jika kombinasi warna ini diatur, maka untuk setiap piksel nantinya bisa menghasilkan berbagai macam-macam warna yang berbeda.
H. Buzzer

Adapun fungsi buzzer adalah sebagai komponen yang menghasilkan output berupa bunyi beep. Kegunaan buzzer yang paling umum yaitu sebagai alarm, indikator suara, dan timer.
- Spesifikasi
Spesifikasi komponen buzzer adalah sebagai berikut :
1. Piezoelectric, yaitu berbentuk tabung berwarna hitam yang menjadi sumber keluarnya bunyi.
2. Kaki pin negatif, yaitu kaki buzzer yang pendek untuk dihubungkan ke arus negatif atau GND.
3. Kaki pin positif, yaitu pin kaki buzzer yang panjang dan gunanya untuk dihubungkan ke arus positif atau VCC/5V.
- Cara Kerja
Prinsip kerja buzzer adalah sangat sederhana. Ketika suatu aliran listrik mengalir ke rangkaian buzzer, maka terjadi pergerakan mekanis pada buzzer tersebut. Akibatnya terjadi perubahan energi dari energi listrik menjadi energi suara yang dapar didengar oleh manusia. Umumnya jenis buzzer yang beredar di pasaran adalah buzzer piezoelectric yang bekerja pada tegangan 3 sampai 12 volt DC.
I. Servo SG-90

Pada servo motor, hubungkan vcc dan ground servo ke arduino, lalu untuk PWM hubungkan ke pin digital arduino.
- Spesifikasi
• Berat: 9g
• Dimensi: kira-kira 22,2 x 11,8 x 31 mm.
• Torsi kios: 1,8 kgf·cm
• Kecepatan pengoperasian: 0,1 detik/60 derajat
• Tegangan pengoperasian: 4,8 V (~5V)
• Lebar pita mati: 10 μs
• Kisaran suhu: 0 ºC – 55 ºC
Posisi "0" (pulsa 1,5 ms) di tengah, "90" (~ pulsa 2 ms) di paling kiri. (ms pulse) ada di kanan, ""-90" (~1ms pulse) ada di kanan kiri.
- Cara Kerja
Motor servo akan berputar sesuai dengan arah yang ditentukan pada program microcontroller (arduino).
J. LED

LED merupakan keluarga Dioda yang terbuat dari semikonduktor. Cara kerjanya hampir sama dengan Dioda yang memiliki dua kutub, yaitu Kutub Positif (P) dan Kutub Negatif (N). LED hanya akan memancarkan cahaya, apabila dialiri tegangan maju (Bias Forward) dari Anoda menuju ke Katoda.
- Spesifikasi
• Umur Panjang: LED dapat bertahan lebih dari 100.000 jam (10+ tahun) jika digunakan pada spesifikasi terukur
• Tidak ada kedipan yang mengganggu seperti dari lampu neon
• LED tahan terhadap panas, dingin, guncangan, dan getaran
• LED tidak mengandung kaca yang mudah pecah
• Solid-State, tahan goncangan dan getaran
• Waktu Nyala/Mati yang sangat cepat
• Konsumsi daya yang rendah mengurangi beban pada sistem kelistrikan sehingga meningkatkan masa pakai baterai
- Cara Kerja
LED terdiri dari sebuah chip semikonduktor yang di doping sehingga menciptakan junction P dan N. Yang dimaksud dengan proses doping dalam semikonduktor adalah proses untuk menambahkan ketidakmurnian (impurity) pada semikonduktor yang murni sehingga menghasilkan karakteristik kelistrikan yang diinginkan. Ketika LED dialiri tegangan maju atau bias forward yaitu dari Anoda (P) menuju ke Katoda (K), Kelebihan Elektron pada N-Type material akan berpindah ke wilayah yang kelebihan Hole (lubang) yaitu wilayah yang bermuatan positif (P-Type material). Saat Elektron berjumpa dengan Hole akan melepaskan photon dan memancarkan cahaya monokromatik (satu warna).
K. Resistor
Resistor memiliki nilai resistansi atau hambatan yang berfungsi untuk menghambat dan mengatur arus listrik yang mengalir dalam rangkaian. Resistor memiliki dua pin untuk mengukur tegangan listrik dan arus listrik, dengan resistansi tertentu yang dapat menghasilkan tegangan listrik di antara kedua pin. Nilai tegangan terhadap resistansi berbanding lurus dengan arus yang mengalir.
- Rumus dari Rangkaian Seri Resistor: Rtotal = R1 + R2 + R3 + ….. + Rn
- Rumus dari Rangkaian paralel Resistor: 1/Rtotal = 1/R1 + 1/R2 + 1/R3 + ….. + 1/Rn
- Rumus resistor dengan hukum ohm: R = V/I

Cara menghitung nilai resistor:
Perhitungan untuk resistor dengan 4 gelang warna :
- Masukkan angka langsung dari kode warna gelang ke-1 (pertama)
- Masukkan angka langsung dari kode warna gelang ke-2
- Masukkan Jumlah nol dari kode warna gelang ke-3 atau pangkatkan angka tersebut dengan 10 (10^n)
- Gelang ke 4 merupakan toleransi dari nilai resistor tersebut
Perhitungan untuk resistor dengan 5 gelang warna:
- Masukkan angka langsung dari kode warna gelang ke-1 (pertama)
- Masukkan angka langsung dari kode warna gelang ke-2
- Masukkan angka langsung dari kode warna gelang ke-3
- Masukkan Jumlah nol dari kode warna gelang ke-4 atau pangkatkan angka tersebut dengan 10 (10^n)
- Gelang ke 5 merupakan toleransi dari nilai resistor tersebut.

#define echoPin 2
#define trigPin 3
#define touch 4
#define SDA 10
#define RST 6
#include <LiquidCrystal_I2C.h>
#include
<MFRC522.h>
#include
<SPI.h>
LiquidCrystal_I2C
lcd(0x27,16,2);
long durasi; //
variable for the duration of sound wave travel
int jarak;
MFRC522
rfid(SDA,RST);
MFRC522::MIFARE_Key
key;
void setup() {
Serial.begin(9600);
lcd.begin();
lcd.setCursor(0,0);
lcd.print("
Selamat Datang!");
delay(1000);
pinMode(touch,
INPUT);//touch
Serial.begin(9600);
SPI.begin();
rfid.PCD_Init();
pinMode(trigPin,
OUTPUT); // Sets the trigPin as an OUTPUT
pinMode(echoPin, INPUT);
// Sets the echoPin as an INPUT
}
void loop() {
lcd.clear();
lcd.setCursor(0,0);
lcd.print(" Scan Card Here!");
lcd.scrollDisplayLeft();
delay(300);
{
if (digitalRead(touch) == HIGH){
Serial.write(1);
lcd.clear();
Serial.print("touch terdeteksi");
lcd.setCursor(0,0);
lcd.print(" Silahkan Keluar");
lcd.scrollDisplayLeft();
delay(1000);
}
else if (digitalRead(touch) == LOW){
Serial.write(2);
Serial.print("touch tidak
terdeteksi");
delay(1000);
}
}
{
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
durasi = pulseIn(echoPin, HIGH);
jarak = durasi*0.034/2;
Serial.print("Jarak : ");
Serial.println(jarak);
delay(1000);
if(jarak <= 10){
Serial.write(5);
Serial.print("jarak sesuai");
lcd.clear();
lcd.setCursor(1,0);
lcd.print(" Silahkan Keluar");
lcd.scrollDisplayLeft();
delay(1000);}
else if (jarak >= 10){
Serial.write(6);
Serial.print("jarak tidak
sesuai");
delay(1000);
}
}
{
if(!rfid.PICC_IsNewCardPresent() || !rfid.PICC_ReadCardSerial())
return;
MFRC522::PICC_Type piccType =
rfid.PICC_GetType(rfid.uid.sak);
if (piccType !=
MFRC522::PICC_TYPE_MIFARE_MINI &&
piccType != MFRC522::PICC_TYPE_MIFARE_1K
&&
piccType != MFRC522::PICC_TYPE_MIFARE_4K)
{
Serial.println(F("tag mu bukan
tipe MIFARE Classic."));
return;
}
String strID = "";
for (byte i = 0; i < 4; i++) {
strID +=
(rfid.uid.uidByte[i] < 0x10 ?
"0" : "") +
String(rfid.uid.uidByte[i], HEX) +
(i != 3 ? ":" : "");
}
strID.toUpperCase();
Serial.print("Tap card key: ");
Serial.println(strID);
delay(500);
if(strID.indexOf("43:6B:EC:11")
>= 0){
lcd.clear();
Serial.write(3);
Serial.print("benar");
lcd.setCursor(0,1);
lcd.print(" <Akses
Diterima>");
lcd.scrollDisplayLeft();
delay(1000);
}
else if(strID.indexOf(false) >= 0){
Serial.write(4);
lcd.clear();
Serial.print("salah");
lcd.setCursor(0,1);
lcd.print(" Akses Ditolak!");
lcd.scrollDisplayLeft();
delay(1000);
}
}
}
#include
<Servo.h>
#include <Wire.h>
int buzzer = 6;
//buzzer pin 6
int led = 4;
Servo servosaya;
int pos = 0;
void setup() {
servosaya.attach(9);
Serial.begin(9600);
pinMode(buzzer, OUTPUT);
pinMode(led, OUTPUT);
servosaya.write(pos);
}
void loop() {
if (Serial.available() > 0) {
int data = Serial.read();
if(data == 1){ //touch(high)
digitalWrite(led, LOW);
digitalWrite(buzzer, HIGH);
delay(500);
digitalWrite(buzzer, LOW);
delay(1000);
servosaya.write(180);
delay(3000);
servosaya.write(pos);
delay(10000);
}
else if(data == 2){ //touch low
servosaya.write(pos);
delay(1000);
}
else if(data == 3){ //rfid benar
digitalWrite(led, HIGH);
delay(500);
digitalWrite(buzzer, HIGH);
delay(500);
digitalWrite(buzzer, LOW);
delay(1000);
servosaya.write(180);
delay(3000);
servosaya.write(pos);
delay(10000);
}
else if(data == 4){ //rfid salah
digitalWrite(buzzer, HIGH);
delay(500);
digitalWrite(buzzer, LOW);
delay(200);
digitalWrite(buzzer, HIGH);
delay(500);
digitalWrite(buzzer, LOW);
delay(500);
digitalWrite(buzzer, HIGH);
delay(500);
digitalWrite(buzzer, LOW);
delay(1000);
servosaya.write(pos);
delay(1000);
}
else if(data == 5){ //jarak dibawah 10 cm
digitalWrite(led, LOW);
delay(500);
digitalWrite(buzzer, HIGH);
delay(500);
digitalWrite(buzzer, LOW);
delay(1000);
servosaya.write(180);
delay(3000);
servosaya.write(pos);
delay(10000);
}
else if(data == 6){ //jarak lebih dari 10
cm
servosaya.write(pos);
delay(500);
}
}









Rangkaian sistem
pintu gudang pintar merupakan rangkaian yang menggunakan RFID sensor, touch
sensor dan ultrasonic sensor. Komunikasi yang digunakan pada rangkaian ini
yaitu UART (Universal Asynchronous Receiver Transmitter) merupakan
metode komunikasi serial dimana digunakannya dua komponen arduino sebagai
master dan slave. Master digunakan sebagai input dan slave digunakan sebagai
output.
RFID sensor dan LCD
akan diletakkan di luar ruangan, sedangkan ultrasonik sensor, touch sensor dan
motor diletakkan di dalam ruangan. LCD di luar ruangan akan menampilkan kalimat
“Scand Card Here”. Ketika sensor RFID mendeteksi adanya kartu yang tertempel
pada sensor maka LCD akan menampilkan kalimat “akses diterima” kemudian pintu
akan terbuka. Setelah itu LED yang digunakan sebagai penerangan akan hidup.
RFID dengan prinsip
kerja ketika kartu yang ditempelkan sesuai maka master akan memerintahkan slave
untuk mengirimkan data, ketika data diterima slave selanjutnya LCD akan
menampilkan tampilan “akses diterima”. Selanjutnya data juga akan dikirim
menuju master sehingga mengkaktifkan servo motor. Ketika servo motor aktif maka
akan membuka pintu, servo motor akan aktif dengan delay 1000 ms. Setelah itu
buzzer akan hidup menandakan pintu terbuka dan LED akan hidup. Ketika pada RFID
tertempel kartu yang salah maka master akan memerintah salve untuk mengirimkan
data, ketika data diterima oleh slave selanjutnya LCD akan menampilkan tampilan
“akses ditolak” dan buzzer akan berbunyi sebanyak 3 kali. Selanjutnya data juga akan dikirim menuju
master, dan data akan diteruskan ke servo motor. Sehingga servo motor tidak
akan membuka pintu.
Touch sensor
diletakkan di dalam ruangan. Touch sensor memiliki prinsip kerja ketika
disentuh maka master akan memerintahkan slave untuk
mengirimkan data. Ketika data diterima oleh salve maka LCD akan menampilkan
"Silahkan Keluar”. Selanjutnya data akan diteruskan menuju master lalu
akan mengaktifkan servo motor. Ketika servo motor aktif maka pintu akan
terbuka, servo motor aktif dengan delay 1000 ms. Kemudian buzzer akan hidup dan
LED di dalam ruangan mati.
Ultrasonik sensor
diletakkan di dalam ruangan ruangan. Ultrasonik sensor memiliki prinsip kerja
ketika sensor mendeteksi dengan jarak < 10 cm, maka data akan masuk ke
master, ketika data diterima oleh master maka akan menggerakan servo motor.
Ketika servo motor aktif maka pintu akan terbuka dengan delay 1000 ms. Kemudian
menghidupkan buzzer dan LED di dalam ruangan mati. Pada ultrasonik merupakan
opsi ketika seseorang ingin keluar gudang dengan membawa barang sehingga tidak
perlu menggunakan tangan untuk membuka pintu.
Tidak ada komentar:
Posting Komentar